|
“BEAM Robotic”的概念是由著名的机器人爱好者Mark Tilden提出的。现在实验室里的多数机器人都是一开始为实现一个复杂的任务而设计,技术门槛高,成本也绝非一般个人爱好者所能够承担。而Mark Tilden则反其道而行之,主张从最基本的模仿自然生物某一功能的简单机器人坐做起,如同自然界生物进化一样,逐渐从简单到复杂的实现机器人的“进化”。正是因为如此,“BEAM”机器人技术门槛低,成本不高的特点吸引了众多业余爱好者的加入。“BEAM”是以下几个单词的缩写:
Biology- 生物学:BEAM机器人都是模仿自然界某些生物来设计自己的电路和机械结构。
Electronics-电子学:用最简单的电路来实现自己的功能。BEAM机器人所用的电路都是最基本的简单电路,这也是BEAM机器人吸引了众多入门者的原因。
Aesthetics-美学:任何作品都需要一个漂亮的外观。
Mchanies-机械:机器人中机械部分与电子部分同样重要。好的机械结构同样是一个成功作品必不可少的部分之一。
以上是BEAMers挂在嘴边的几个关键词汇,在实际作品中可能不能够面面俱到(尤其是第三点),但也应该作为最基本的设计出发点来考虑。
概括起来说,BEAM 机器人主要是指个人爱好者业余制作的,由最简单电路驱动的模仿自然界某一生物的某一项基本行为的机器人。大多BEAM机器人的控制芯片都采用普通的8位单片机或是直接由PC机做上位机通过有线或无线连接直接控制;驱动方式多用双轮差速驱动实现,有一小部分机器人还实现了简单的四足或双足驱动;大多BEAM机器人所配备的传感器也比较简单,多由碰撞开关或红外传感器来实现避障,另外用的比较多的还有光敏电阻和红外测距传感器等等。大多业余机器人爱好者所制作的机器人或多或少都包含了一些BEAM的元素。
一般常见的BEAM机器人多为以下功能:
1、避障:这是最基本的BEAM机器人,也是大多BEAM机器人所必须的功能,多采用两个或三个红外测障传感器或碰撞开关来检测障碍物,机器人由一片单片机控制,多为电机驱动。可实现机器人无障碍的躲避各种障碍物。
2、趋光:机器人主体部分与避障机器人无异,只是传感器略有不同。一般在机器人前部安装两个光敏传感器,靠两个传感器的不同返回值的差速来判断光源的方向并逐渐趋近。
3、循迹:此类机器人的基本功能是靠机器人底部的光敏或红外之类的传感器来发现地面上的标志(多为黑地白线或白地黑线),并循线前进。
近几年,随着各种机器人比赛在国内的蓬勃开展。国内的机器人爱好者也越来越多,但由于技术或经济上的原因,使众多机器人爱好者难以开展较为复杂的项目,而BEAM机器人由于成本低,资料丰富,较易上手,成为众多爱好者们首选的项目。
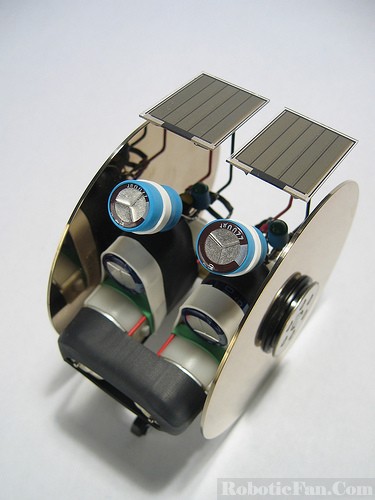
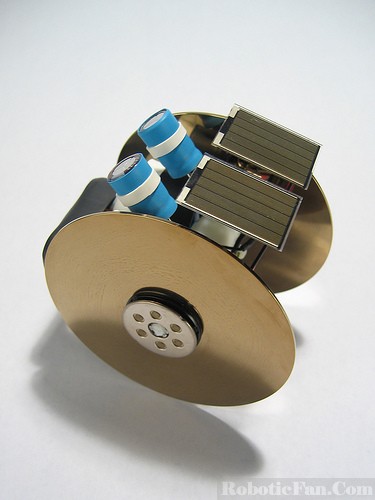
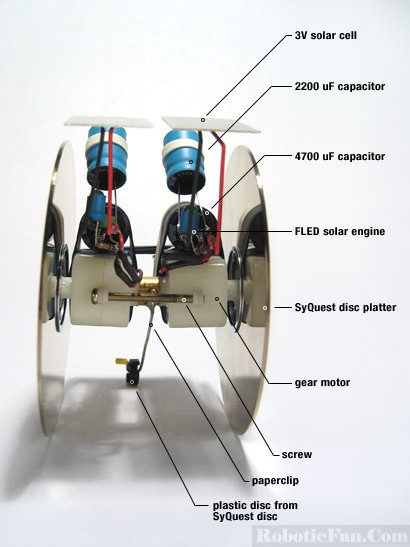
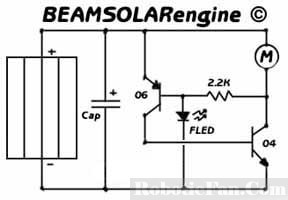
下面这个Twin-Engine Solarroller就是一个绝佳的BEAM实践项目,由太阳能供电,并能寻光或避光,已经是一个很像样的机器人了,但只要9个现成器件就可以完成,没有MCU,而且非常漂亮!!下面是效果图和组成图:
/*原文链接:http://www.roboticfan.com/blog/user_2005/1229/index.shtml */
|


