|
摘要:本文将探讨机器视觉应用的 CMOS 图像感应器技术及架构要求。此外,还将详细分析机器视觉的基本组件,摄像头为满足应用需求需要哪些条件,以及如何设计出可满足各种机器视觉应用需求、同时又能在图像质量与成本之间获得平衡的摄像头。
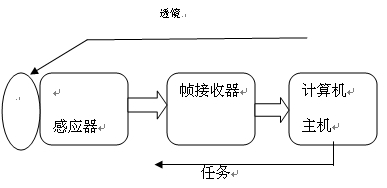
总体上说,机器视觉就是让电子光学系统(摄像头)连接至如计算机等处理单元,以进行图像处理并对相关系统实现控制。换言之,机器视觉系统就是指能够看到目标对象的系统或计算机。受计算机控制的系统可包括生产单元、产品质量控制以及抓放设备等。
机器视觉要求什么?
机器视觉系统应当包括图像感应器与透镜系统,这通常整体称作摄像系统,可需要通过火线、USB或以太网等电气接口连接到计算机,而计算机则连接至控制设备。
a) 摄像头
b) 计算机(主机)
c) 帧接收器
d) 应用软件
机器视觉应用需要结合软、硬件才能确保成功工作。选择适当的硬件固然重要,但视觉检查软件则形成了所有机器视觉系统的核心。通常由像素时钟驱动的感应器将由用户通过SPI 或 I2C 接口设置寄存器来配置分辨率、工作速度、增益控制、曝光时间以及集成时间。感应器可输出帧同步和线路同步脉冲以及待处理的数字数据。感应器的电气接口为CMOS,可支持高达 200 MHz 的频率。如果速度更高,则需要 LVDS 接口来实现信号完整性。
机器视觉摄像头的典型系统架构为:
1 离线处理功能的摄像头
在机器视觉系统的上述配置中,包含独立的摄像头,它采用业界标准的电气接口,如火线、USB 或千兆以太网等。可单独对摄像头供电,并可通过电气接口将原始数据传送至主机。视频传输既可以是连续帧,也可以是单帧数据,具体取决于应用的需要。单帧捕获与视频传输被称作触发模式,需要外部系统通常以 CMOS 级向摄像头系统发送电子脉冲。摄像头逻辑将启动一个帧集成,并通过电气接口将扫描的数据发送至主机。在某些情况下,原始数据通过总线与同步信号、时钟和数据一起发送给帧接收器等终端数据采集系统。帧接收器在存储器中存储数据,随后可由主机应用软件对数据进行存取以处理和控制。
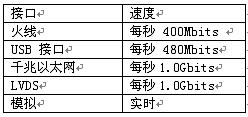
摄像头连接到主机的电气接口包括:
1 火线 IEEE 1394 接口
2 USB 接口
3 自动化图像协会定义的千兆以太网视觉接口 (GigE Vision interface)
4 合成模拟视频接口
5 LVDS
离线处理的一大优势在于,单靠一个主机就能满足摄像头操控与系统控制两者之需。不过,由于视频数据从摄像头每帧传输存在一定的延迟,因此这种处理方式不适用于实时处理的应用,比如器件生产过程中传送带上的产品检查。
2 在线处理功能的摄像头
近期,DSP 处理器发展非常快,已经具备实时执行复杂算法的计算功能,因此也使得摄像头的在线处理成为可能。此类摄像头包括感应器与 DSP 处理器,二者可通过非粘接逻辑、也可通过某种粘接逻辑连接。DMA 将感应器扫描的视频直接发送至 DSP 存储器,并进行逐帧处理。控制函数的最终结果由处理器在被控制的系统中直接启动,或在主机上作为命令启动。
在摄像头中进行视频处理的优势在于,数据处理可实时进行,而且在火线、USB 或千兆以太网接口上没有分组处理的负担。我们可采用字节优化型汇编代码,在时钟频率超过 300 MHz 的 DSP 处理器上加快实时处理速度。
图像算法的实时处理对检查应用至关重要,例如,能够检查出传送带上移动过快的的器件。一个帧图像的计算完成并采取相应行动后,才可以继续向系统传输下一个图像帧。
至关重要的规范:
对于机器视觉系统来说,图像质量是直接影响最终图像处理结果的关键因素。特别是在自然光照条件下,图像质量随着光源条件的变化会有明显的不同。对诸如“增益”和“曝光时间”等摄像头设置作出相应调解可对不稳定的环境光情况作出补偿,从而提高图像质量。
根据最终应用的情况和感应器与扫描对象的距离,光源可由单独的设备提供,也可以是摄像头透镜周边的一部分。如果光源在摄像头周边,那么摄像头可与光源一起移动。常用的光源包括卤素灯泡、荧光灯泡以及发光二极管 (LED) 等。
影响图像质量的因素包括:
1 光照强度
2 光照方向
3 目标距离
4 焦距
5 采样率
6 曝光时间和增益
7 暗漏电流
8 分辨率(像素数量)
透镜的选择与要求:
高质量透镜与感应器质量同等重要。摄像头是一种电子光学系统,需要光学元件和电子元件协作生成图像。图像模糊问题通常是由透镜选择不当造成的。最佳透镜尺寸和形状取决于焦距,不过对较小的对象距离来说,一般使用C 座透镜。如果摄像头需要在高反射环境条件下工作,那么最好选用抗反射膜透镜。整体摄像头的视野覆盖面取决于所需视野的区域、工作距离和透镜。
透镜设计/选择的另一关键参数就是最终对象分辨率(单位为毫米或密耳,即千分之一英寸)。
如果摄像头用于测量生产环境下的对象尺寸,需考虑以下几个重要参数:
1 视野
2 感应器分辨率(像素数量)
3 图像质量
4 视觉工具精确度
例如,如果采用 IBIS5-1300 感应器(130 万像素,分辨率为1280(h) X 1024 (v)),工具的精确度为十分之一像素,那么 5 英寸宽、4 英寸高的对象在6英寸 FOV 水平方向上精确度可达到 0.0004 英寸。
分辨率:根据视野和最终扫描对象的图像粒度,一般使用 VGA 到百万像素阵列标准。
灵敏度:单色或彩色:大多数检查应用可采用单色感应器生成灰度级。典型的应用包括条形码阅读器、指纹扫描仪、制造设备的尺寸测量等。
如果质量和生产控制中需要掌握对象的色彩信息,则使用彩色感应器,如辣椒或苹果的分级和分类等。感应器的24位彩色数据可捕获 1740 万种不同的色彩。
感应器的参数和选择:
就机器视觉应用而言,感应器和摄像头需要支持多种不同的分辨率和帧速率。如果感应器支持可编程特性,那么就能针对各种机器视觉应用增加更多通用摄像头设计。通常支持的特性包括:
* 窗口和分辨率选择
* 用户可对高帧速率进行编程
* 标准电气 CMOS 接口
* 低感应器暗漏电流
* 宽动态范围
必须在工业操作环境内确保可靠性和感应器性能。设备应当是工业级的,通常在 0 至 80 摄氏度之间操作。
应用:
* 引导:采用机器人抓放技术的设备系统
* 检查:纹理、表面、商标、组装
* 测量:产品部件的物理尺寸、组装部件尺寸
* 识别:抓放设备、机器人技术、读取字符、读取代码
赛普拉斯半导体为图像感应器提供了高帧速率和用户可选的参数,同时能在工业温度范围内正常工作,因此可理想地用于机器视觉摄像头设计。就 IBIS 和 LUPA 系列感应器而言,帧速率在每秒 30 F至 500 F之内。 |


